Replacing Hazardous Work in Chemical Plants with a Humanoid Robot — A Unitree G1 Proof-of-Concept with Asahi Kasei Corporation for Labor-Saving Carrier Transport —
Case Study
Contact US

Replacing Hazardous Work in Chemical and R&D Sites with Humanoids
Chemical plants and R&D sites still contain a great deal of hazardous work that only humans can perform: immersion in chemical solutions, handling of high-temperature equipment, dealing with powdered materials — areas where there has long been strong demand for solutions that improve worker safety while reducing manpower requirements. Arm-type industrial robots have often struggled to take over these tasks because of constraints around motion paths and floor-space requirements.
This is where humanoids — robots that operate in the same physical space as humans — have emerged as a serious option. This article introduces a proof-of-concept (PoC) that Asahi Kasei Corporation and GMO AI & Robotics Corporation (hereafter "GMO AIR") jointly conducted on humanoid utilization. The subject of the PoC was whether a general-purpose humanoid — the Unitree G1 — could transport an experimental film carrier and thereby reduce the manpower needed for this carrying task.
Customer Profile
Asahi Kasei Corporation, since its founding in 1922, has built on its chemistry-based core technologies to expand into housing, electronics, and pharmaceuticals & medical devices. It now operates across three business areas — "Health Care," "Homes," and "Material" — and as a globally unique company aims to continue creating innovative products, services, and business models.
- Head office: Hibiya Mitsui Tower, 1-1-2 Yurakucho, Chiyoda-ku, Tokyo
- Business areas: Health Care / Homes / Material
The Challenges Asahi Kasei Faces Today
The Experimental Film Carrier and the Hazard of "Immersion into Chemical Baths"
Asahi Kasei designs and uses a dedicated carrier that holds multiple experimental films (plate-shaped pieces) for research applications. The sides of the carrier have horizontal slits into which the films produced in experiments are inserted; the whole carrier is then immersed in a chemical bath. This was the conventional workflow.
The issue with this process is the risk of chemical splashes onto the operator. A carrier loaded with multiple films is reasonably heavy, and its contact area with the chemical is large, so some splashing inevitably occurs at the moment of immersion. This kind of "small but continuous hazard" — common in chemical research environments — was a key driver of the need to replace such work with robots, both for labor savings and for operator safety.
Why a Humanoid Rather than an Arm-Type Robot?
For similar problems, arm-type industrial robots have historically been the main candidate. However, arm-type robots have constraints such as:
- Requiring dedicated fixed floor space for installation
- Specialized motion paths and jigs that do not fit easily into existing site layouts
- Difficulty in pivoting flexibly to handle unforeseen tasks
These factors make them a poor fit for environments — such as research sites — where the nature of the work changes frequently.
Humanoids, on the other hand, share human shape and human range of motion, so they can use existing workbenches and tools as-is, and switch flexibly between tasks. The use case in this PoC — "have the robot pick up an existing carrier in place of a person and carry it" — is exactly the kind of scenario where the humanoid's advantages stand out the most.
Common Hurdles to Adopting Humanoids
Through our on-site interviews, we frequently hear — not only from Asahi Kasei — that "we are interested in humanoids, but it is hard to just buy one." Specifically:
- Risk of model obsolescence: Worry that a newer model will reach the market before they have mastered the current one, leaving the investment unrecovered
- The Sim2Real gap: They are running simulations in tools such as Isaac Sim, but lack an environment for validating policies on real hardware, so models cannot be brought all the way to the site
- The single-task ROI ceiling: Automating only one task in a confined space such as a research lab makes it difficult to justify the cost
Asahi Kasei shared the same concerns, which is exactly why they chose a PoC format — "GMO AIR brings the actual humanoid to the site and we validate it together" — rather than purchasing the robot themselves.
Overview of the PoC
The overall scope of this PoC is summarized below.
- Robot used : Unitree G1 (general-purpose compact humanoid by China's Unitree)
- Format : PoC (proof of concept)
- Target work : Experimental film carrier (approx. 0.8 kg)
- Objective : To verify whether a humanoid can carry the carrier
- Expected benefits : Replacing hazardous work / labor savings / improved operator safety
- Location : Asahi Kasei Moriyama Works, Production Technology Development Center
- Period : February 2026

About the Unitree G1
The Unitree G1 is a general-purpose humanoid roughly 130 cm tall. With bipedal locomotion and dual-arm manipulation, it is one of the models seeing growing global adoption in R&D and PoC use cases. Its relatively compact form factor lets it enter tight spaces, and its ability to perform two-handed work at workbench height aligned well with the requirements of this use case.

Details of the Validation
In the PoC, we broke the act of carrier transport down into the following two steps and verified, stage by stage, whether each could be performed by the humanoid.
- Two-handed grasp of the carrier: Grip both handles of the carrier and lift it while keeping it level
- Walking transport: Walk a set distance while holding the carrier, and deliver it to the destination

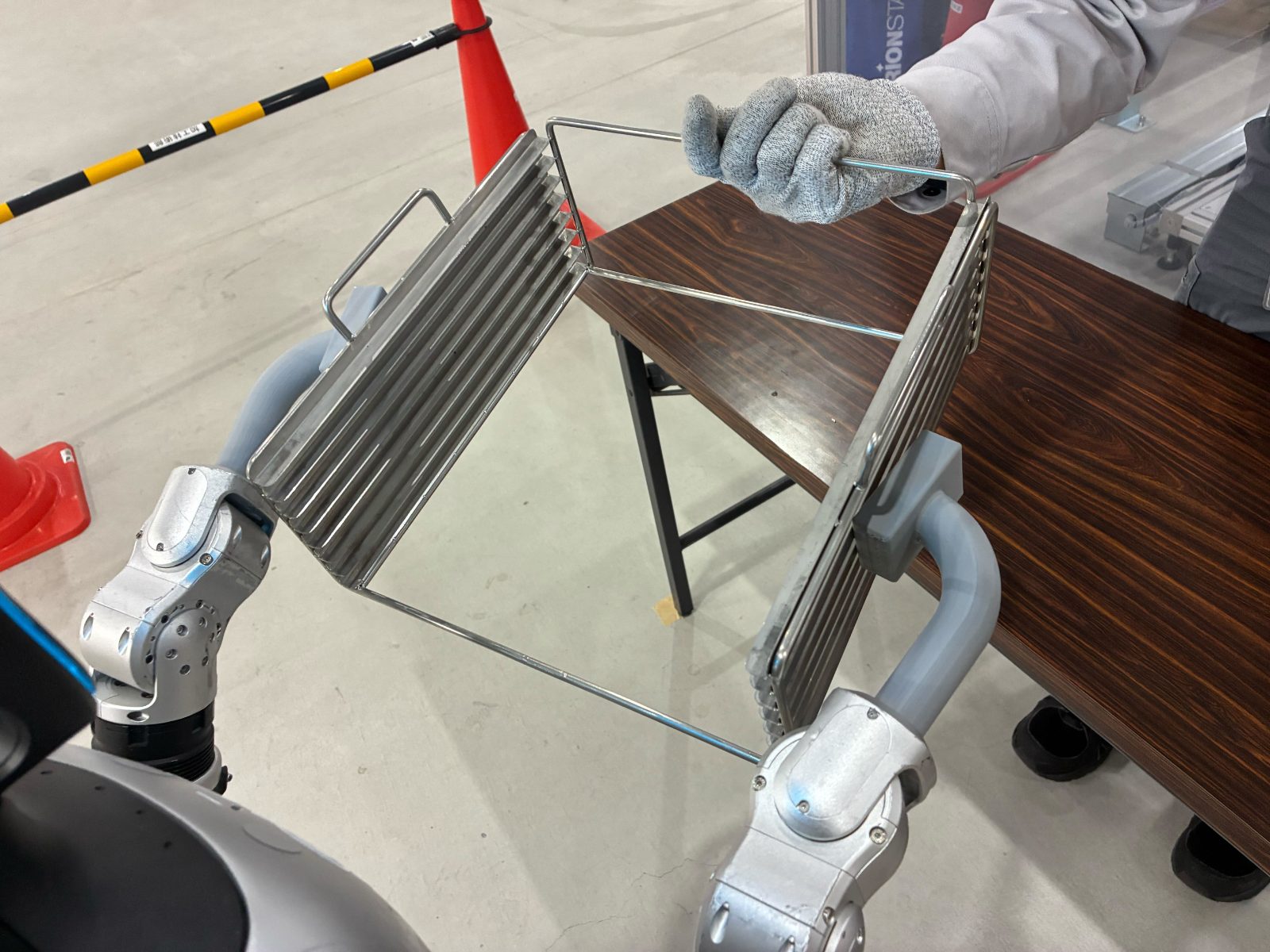
Footage from the validation. We confirmed that the Unitree G1 can lift the carrier with both hands and move it between tables.
The Strength of "Sharing the Human Form" as Seen on Site
When using an arm-type robot for this kind of replacement, you generally need to design new jigs and grippers to match the shape of the carrier's handles and the transport path. In this PoC, by contrast, we used the existing carrier as-is. "Carry it the same way a person would, along the same path a person would take." This seamlessness captures the essence of why humanoids are worth bringing into research environments.
Comments from Asahi Kasei
Through this PoC, we received the following comments from Asahi Kasei.
Were the Expected Motions Achieved?
We were able to execute, inside our own facility, the very motions we had expected from prior research and from robot exhibitions. We also learned what issues need to be cleared on the way to real on-site implementation — gaining even more insight than we had hoped for.
We were told that what they had grasped at trade shows and demos as "what humanoids can do" was reproduced — at least in PoC form — with their own work pieces and their own layout. At the same time, being able to identify in advance the elements that will become bottlenecks when expanding to a production setting was an outcome only a PoC could deliver.
What They Want Humanoids to Do Next
What Asahi Kasei sees humanoids handling in the future is "work inside the plant." Starting from validation at the R&D site, they envision expanding the scope to a wide range of tasks on production lines.
Concrete candidate use cases that came up in our on-site interviews include the following:
- Replacement of incidental work that involves hazardous solutions
- Raw material loading
- "Small routine tasks" such as cart-based transport
- Automatic load/unload of work pieces into and out of machines that handle multiple product types
- Loading of experimental films at equipment start-up (infrequent but essential)
None of these alone is large enough to justify automation on ROI grounds, but with a platform like a humanoid — capable of covering multiple tasks with a single unit — combining them adds up to a viable business case.
As for the timing of adoption, the answer was "as soon as possible," underscoring how high expectations for humanoid utilization actually are.
Remaining Challenges Before Real-World Adoption
On the other hand, the following challenges were identified as prerequisites for full-scale on-site deployment of humanoids:
- Return on investment: A single task alone rarely makes the economics work — the key is an operations design that bundles multiple tasks
- Motion precision: Ensuring the accuracy and stability needed for production-grade operation
These are common topics across the industry when moving humanoids from R&D use to production use. GMO AIR will continue to support Asahi Kasei in their adoption efforts — across model selection, control tuning, and operations design.

For Companies Considering Humanoid Adoption
GMO AIR acts as a domestic partner that walks alongside customers from the PoC stage, accepting inquiries about humanoid utilization in chemicals, manufacturing, logistics, and R&D. We also offer a Labor as a Service (Robot Dispatching Service) that lets you try the robot on site without purchasing it — well-suited to those who want to validate Sim2Real without carrying the risk of model obsolescence.
- "Could a humanoid replace this task at our site?"
- "I'd like to try out what the Unitree G1 is capable of."
- "I'd like to validate the fit with our company's needs before adopting it."
Inquiries like these can begin as a PoC where we get hands-on together.
Contact Us© GMO AI & Robotics Corporation (GMO AIR) / Coverage cooperation: Asahi Kasei Corporation / Photos taken at the company's PoC site
