
化学・研究現場の危険作業をヒューマノイドで置き換える
化学プラントや研究開発現場には、今も「人でしか担えない危険作業」が数多く残っています。薬液への浸漬、高温設備の扱い、粉体のハンドリングなど、いずれも作業員の安全と省人化を両立する解決策が強く求められてきた領域です。アーム型の産業用ロボットでは、動線や設置スペースの制約から置き換えが難しいケースも少なくありません。
そこで選択肢に浮上してきたのが、人と同じ動作空間で作業できる「ヒューマノイド」です。 本記事では、旭化成株式会社様とGMO AI&ロボティクス商事株式会社(以下、GMO AIR)が共同で実施したヒューマノイド活用のPoC(実証実験)事例をご紹介します。題材は、実験フィルム搬送用カゴを汎用ヒューマノイド「Unitree G1」で運搬し、カゴ搬送の省人化が成立しうるかを検証するというものです。
お客様プロフィール
旭化成株式会社は、1922年の創業以来、化学を基盤とするコア技術を発展させながら、住宅、エレクトロニクス、医薬・医療と事業を展開し、現在は「ヘルスケア」「住宅」「マテリアル」という3つの領域を手掛ける世界的にもユニークな企業として、持続的にイノベーティブな製品・サービス・ビジネスモデルを創出することを目指しています。
- 本社所在地: 東京都千代田区有楽町一丁目1番2号 日比谷三井タワー
- 事業領域: ヘルスケア領域 / 住宅領域 / マテリアル領域
旭化成様が現状抱えている課題感
実験フィルム搬送用カゴと「薬液槽への投入」という危険作業
旭化成様は、研究用途で実験フィルム(板状のプレート)を複数枚搭載する専用の搬送用カゴを設計・使用されています。カゴの側面は横向きのスリット構造になっており、ここに実験で作製したフィルムを挿入し、カゴごと薬液槽に浸漬させるのが従来のワークフローでした。
この工程で課題となっていたのが、薬液が作業者に跳ねるリスクです。 フィルムを複数枚挿入したカゴにはそれなりの重量があり、薬液との接触面も広くなるため、投入の瞬間にどうしても液はねが生じてしまいます。化学研究の現場では珍しくないこの種の「微細だが連続する危険」が、省人化と作業者安全のためのロボット代替ニーズにつながっていました。
なぜアーム型ではなくヒューマノイドか
似た課題に対して、これまで主に検討されてきたのはアーム型の産業用ロボットでした。しかしアーム型は、
- 設置に固定スペースを要する
- 動線や治具が専用化され、既存の現場レイアウトに馴染みにくい
- 想定外の作業へ柔軟に振り替えにくい
といった制約があり、研究現場のように作業内容が頻繁に変わる環境にはフィットしづらい側面があります。
一方、ヒューマノイドは人と同じ形・同じ可動域で動けるため、既存の作業台や治具をそのまま使えるうえ、タスクの切り替えにも柔軟に対応できます。今回のように「今ある搬送用カゴを、人の代わりに持たせて運ばせる」ユースケースでは、ヒューマノイドのメリットが最も生かされる領域です。
ヒューマノイド導入にまつわる共通の壁
現場ヒアリングを重ねる中では、旭化成様に限らず「ヒューマノイドに興味はあるが、いきなり買うのは難しい」という声が多く寄せられます。具体的には次のような論点です。
- 機種の陳腐化リスク: 使いこなす前に新しいモデルが市場に登場し、投資を回収しきれないのではないかという不安
- Sim2Real のギャップ: Isaac Sim などでシミュレーションには取り組んでいるが、ポリシーを実機で検証する環境がなく、現場に降ろし切れない
- 単工程ROIの壁: 研究ラボのように狭い空間で1作業だけを自動化しても、費用対効果が成立しにくい
旭化成様でも同様の懸念は強く、だからこそ自社購入ではなく「GMO AIR がヒューマノイド実機を現場に持ち込んで一緒に検証する」PoC という形態が選ばれました。
実施概要
本PoCの全体像は以下の通りです。
- 採用機種 : Unitree G1(中国Unitree社製・汎用小型ヒューマノイド)
- 実施形態 : PoC(概念実証)
- 作業対象 : 実験フィルム搬送用カゴ(約0.8kg)
- 検証目的 : ヒューマノイドでカゴを搬送可能か
- 期待する効果 : 危険作業の代替 / 省人化 / 作業者安全の向上
- 実施場所 : 旭化成様 守山製造所 生産技術開発センター
- 実施時期 : 2026年2月

Unitree G1 の特徴
Unitree G1は、身長約130cmクラスの汎用ヒューマノイドです。二足歩行と両腕マニピュレーションを備え、研究開発・PoC用途で世界的に採用が広がっている機種のひとつに数えられます。比較的コンパクトな体格で狭所にも入りやすく、作業台の高さに合わせた両手作業が可能な点が、今回のユースケースとの親和性を高めています。

検証内容の詳細
PoCでは、カゴ搬送という一連の動作を次の2ステップに分解し、それぞれヒューマノイドで成立するかを段階的に確認しました。
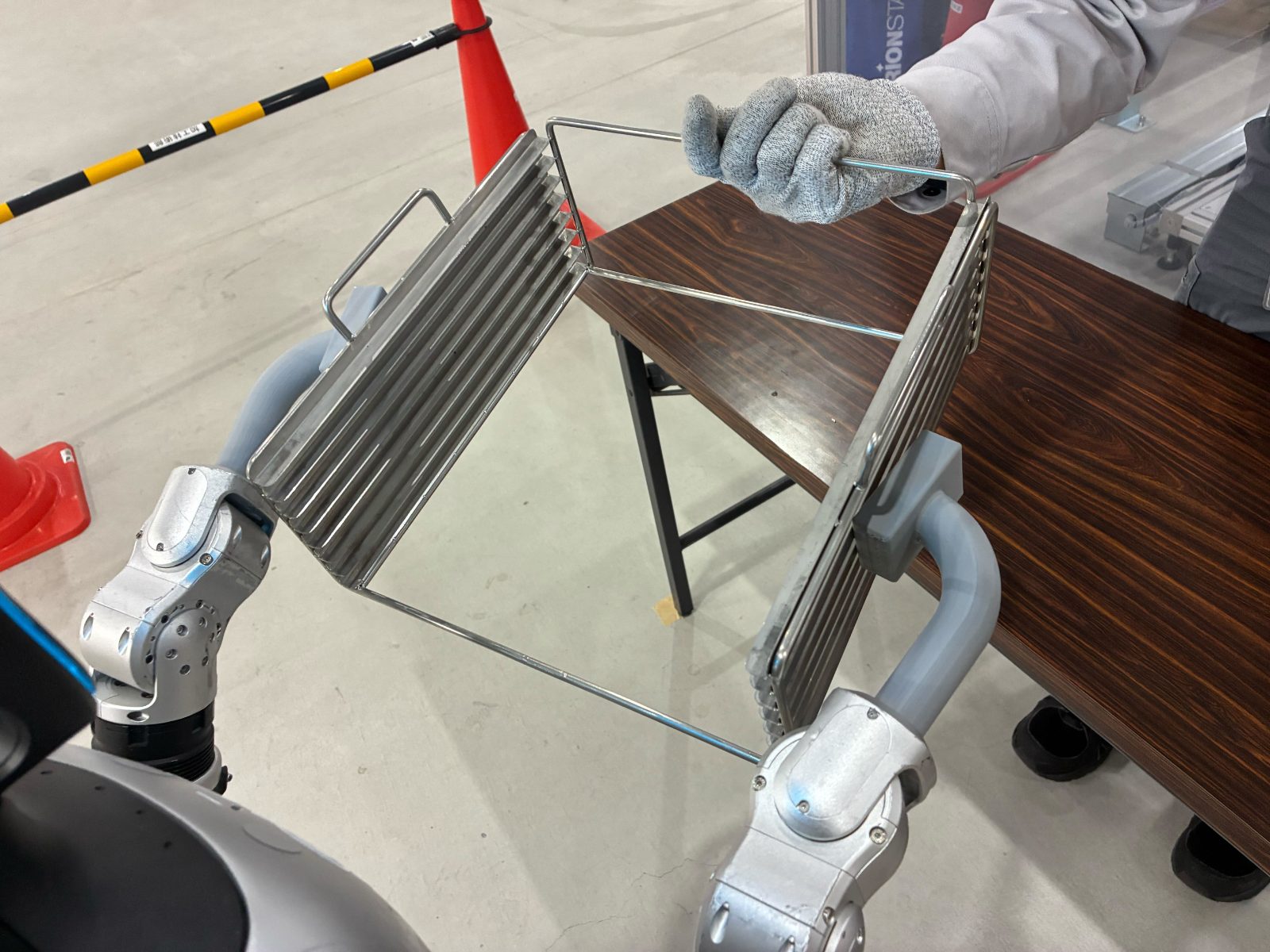
- 搬送用カゴの両手把持: カゴの取っ手を両手で掴み、水平を保ったまま持ち上げる
- 歩行搬送: 把持した状態で、一定距離を歩行して搬送先まで運ぶ

実際の検証映像です。Unitree G1 が搬送用カゴを両手で持ち上げ、テーブル間を移動させて運搬できることを確認できました。
現場で見えた「人と同じ形であること」の強み
アーム型での代替を検討する場合、カゴの取っ手形状や搬送動線に合わせて治具・グリッパを新規設計する必要があります。対して、今回のPoCで使用したのは既存のカゴそのままです。「人が持つのと同じ形で、人と同じ動線で運ぶ」。この透過性こそが、ヒューマノイドを研究現場に持ち込む意義を端的に示していました。
旭化成様からいただいたコメント
今回のPoCを通じて、旭化成様から以下のコメントをいただきました。
期待していた動作は実現できたか
事前調査やロボット展で見せていただいた期待していた通りの動作を、自社内の施設で実施できました。現場実装までにクリアするべき課題を知ることができて、期待以上の知見を得ることができました。
事前に展示会やデモで把握していた「ヒューマノイドができること」を、PoCとしては自社のワークと配置で再現できたというご評価をいただきました。同時に、量産現場へ展開するにあたってボトルネックになる要素を事前に洗い出せたことも、PoCならではの収穫となりました。
今後ヒューマノイドにやらせたいこと
旭化成様が将来的にヒューマノイドに担ってほしいと考えているのは「工場内での作業」とのことです。研究開発現場での実証を皮切りに、生産ラインでの多様なタスクへ適用範囲を広げていく構想が見えています。
現場ヒアリングで挙がった具体的なユースケース候補は、たとえば次のようなものです。
- 危険な溶液を扱う付帯作業の代替
- 原材料投入
- 台車搬送などの "ちょっとした定型作業"
- 多品種に対応した装置へのワークの自動ロード/アンロード
- 設備立ち上げ時の実験フィルム投入(頻度は低いが必須の工程)
どれも単独ではROIが成立しにくい作業ですが、ヒューマノイドのように1台で複数タスクを横断できるプラットフォームであれば、合算することで採算ラインに乗せる道筋が見えてきます。
導入時期については「すぐにでも」とのご回答もいただいており、ヒューマノイド活用への期待値の高さがうかがえます。
現場導入に向けて残る課題
一方で、ヒューマノイドを本格的に現場導入するにあたっては、次のような課題を認識されています。
- 投資採算性: 1工程だけでは費用対効果が出にくく、複数タスクを束ねた運用設計が鍵となる
- 動作の精度: 量産品質で稼働させるための精度・安定性の担保
これらはヒューマノイドを研究開発用途から生産用途へ移行させるうえで、業界共通の論点です。GMO AIR としても、引き続き機種選定・制御チューニング・運用設計の面で旭化成様の導入検討に伴走してまいります。

ヒューマノイド活用をご検討の企業様へ
GMO AIR は、PoC段階から伴走する国内パートナーとして、化学・製造・物流・研究開発領域におけるヒューマノイド活用のご相談を承っています。購入せずに実機を現場で試せるヒューマノイド派遣サービスもあり、「機種の陳腐化リスクを負わずに Sim2Real を検証したい」というニーズにも対応できます。
- 「現場のこの作業、ヒューマノイドで置き換えられる?」
- 「Unitree G1 で何ができるのか、一度試してみたい」
- 「導入前に、自社課題との適合性を検証したい」
このようなご相談は、まずはPoCという形で一緒に手を動かすことから始められます。
お問い合わせ© GMO AI&ロボティクス商事株式会社(GMO AIR) / 取材協力: 旭化成株式会社様 / 写真: 同社PoC現場にて撮影
