Pika+G1でピッキング(ハード編):Pika Sense/Pika Stationのセットアップと、Pika GripperのUnitree G1接続
エンジニアブログ
お問い合わせ
0. はじめに / この記事のゴール
こんにちは、リサーチエンジニアのM. Mです。
Pikaと呼ばれるグリッパー型のハンドとUnitree G1を使って様々なものをピッキングさせる開発を行なっています。
まずは完成形の動画から。Unitree G1 に AgileX Robotics の Pika Gripper を載せ、スポンジをピッキングさせたときの様子です。
このデモを実現するために、ハードのセットアップ → 人手でデータを集め → モデルを学習し → G1 にデプロイして → スポンジをピッキングさせる、という一連のパイプラインを構築しました。
本記事は、この最初のステップである ハードのセットアップ を扱います。具体的には、
- Pika とは何か(3モジュールの役割)
- Pika Sense / Pika Station の設置と接続(人手データ収集側の準備)
- Unitree G1 への Pika Gripper の接続(ロボット実行側の準備)
までです。データ収集の実作業・モデル学習・G1へのデプロイ・ピッキングの実行は、後続の記事で順に扱います。
全体ワークフロー
動画のピッキングに至るまでの全体像は次のとおりです。本記事は (0) ハード準備 のパートにあたります。
(0) ハード準備 ← 本記事
Pika Station設置 / Pika Sense接続 / Pika Gripper を G1 に接続
│
▼
(1) データ収集 人がPika Senseでスポンジのピッキングを実演し、
RGB / グリッパー角 / 6D姿勢 を記録
│
▼
(2) モデル学習 収集データでACTモデルを学習
│
▼
(3) G1へデプロイ Jetson Orin NX が観測取得とG1制御を担当し、
推論は別PC(推論サーバ)で実行。観測を送り→推論結果を受け取り
→G1アーム制御で動かす
│
▼
(4) スポンジ G1 + Pika Gripper でスポンジをピッキング ← 冒頭の動画
ピッキング補足
本記事のスペック値は AgileX 公式の公開情報・マニュアルに基づきます。製品ラインは販売店・ロットによって構成や付属品・重量表記が揺れるため、実際に同梱されていた現物を正として、本文の数値は確認の出発点として扱ってください。
1. Pikaとは?
Pika は、模倣学習・VLA向けの「データ収集グリッパー」システムです。人がハンドヘルド機(Pika Sense)でデモを実演し、その軌跡をロボットアームに載せた実行機(Pika Gripper)で再生・推論する、という UMI(Universal Manipulation Interface) 系の発想を製品化したものです。
役割の異なる3モジュールで構成されます。
モジュール | 役割 | 電源 | PCとの接続 |
|---|---|---|---|
Pika Sense | データ収集器 | USBバスパワー (外部電源不要) | USB 3.0 ケーブル1本 |
Pika Gripper | ロボットでのエンドエフェクタ | 別途 24V DC が必要 | USB 3.0 ケーブル1本 |
Pika Station | Pika Sense位置姿勢を測る外部基準 | AC給電(100Vコンセント) | USBレシーバ(無線) |
Pika Sense


Pika Gripper


Pika Sense と Pika Gripper は見た目が似ていて同じセンサ(深度カメラ・魚眼カメラ・IMU)を積んでいますが、役割が違います。Pika Sense は人が手に持って動かし、その動きを集める側。Pika Gripper はロボット腕に付けて、集めて学習した動きを再生して実際に動かす側です。
Pika Station


Pika Stationは三脚がついてくるので、写真のように3脚の上にセンサを設置します。
今回の構成(両腕分)
今回は G1 を両腕で動かすことを前提にするため、Pika Sense と Pika Gripper を 2台ずつ用意しました。Pika Station も2台ですが、こちらは両腕だからではなく、Pika Sense が1台でも2台必要です(測位システムの仕様として2台が必須)。
2. Pika Sense と Pika Station の設置と接続
人手でデータを集める側のセットアップです。順序は Pika Station設置 → 測位タグのペアリング(初回のみ) → Pika Sense接続 です。
2-1. Pika Station の設置
Pika Station は2台を作業場所周辺に設置します。実際に設置した様子が以下です。
画像右側のテーブルで作業する想定で、左側に2台Pika Stationを立てています

設置のポイントは2つだけです。
- 必ず2台で運用します。測位システムの仕様として2台が必須で、1台では測位が成立しません。周辺に立て、ワークスペース全体が両方の視野に入るようにします。
- 電源はAC(100Vコンセント)で、2台それぞれに必要です。
コンセントが2口(または延長ケーブル)それぞれの設置位置に届くかを事前に確認しておきます。
2-2. 測位タグのペアリング(初回のみ)
Pika Station は SteamVR の Lighthouse 方式をそのまま使っているため、測位タグと Pika Station は、初回のみ Windows の SteamVR 上でペアリングが必要です。一度ペアリングしてしまえば次回以降は不要です。
2-3. Pika Sense の接続
Pika Sense は外部電源不要で、USB 3.0 以上のケーブル1本でPCに繋ぐだけです。接続している様子が以下です。

接続順序に注意
複数Pikaを繋ぐと /dev/ttyUSB* や /dev/video* の番号が起動・接続順で入れ替わります。公式UR連携事例では、Pika Senseを先に挿すと /dev/ttyUSB0 に割り当たると報告されています。2台運用や再起動でズレるため、
- 「左手を先に挿す」など挿す順序を運用ルール化する
- もしくはudev / SDK同梱のバインドツールでポートを固定する
のどちらかを最初に決めておくのが安全です。公式マニュアルでも、魚眼カメラのポートや深度カメラのシリアルを読み取って左右を区別する手順が案内されています。
3. G1への Pika Gripper の接続
ロボット実行側のセットアップです。Pika Gripper を次の4項目に分けて、G1 への接続までをまとめます。
3-1. Pika Gripper の基本情報
Pika Gripper は、ロボットアームの手首に取り付ける実行側のエンドエフェクタです。人がPika Senseで集めた軌跡を再生・推論する役割を担います。Pika Senseと同じセンサ群(深度カメラ・魚眼カメラ・IMU)を持ちつつ、モータでグリッパーを駆動して開閉するのが違いです。
3-2. Pika Gripper のカメラについて
Pika Gripper には2種類のカメラが載っており、手先視点での観測ストリームを提供します。実機で lsusb を叩くと、関係するデバイスは以下のように見えました(抜粋)。
# 深度カメラ(Intel RealSense D405)
Bus 003 Device 039: ID 8086:0b5b Intel Corp. Intel(R) RealSense(TM) Depth Camera 405
# 広角カメラ(DECXIN CAMERA)
Bus 003 Device 038: ID 1bcf:2cd1 Sunplus Innovation Technology Inc. DECXIN CAMERA
# グリッパー制御のシリアル変換(CH340)
Bus 003 Device 041: ID 1a86:7522 QinHeng Electronics CH340 serial converter① 深度カメラ:Intel RealSense D405
- 用途:手先まわりのRGBD情報取得。点群を使った把持位置推定や、収集データの3D可視化に効く
② 広角カメラ:DECXIN CAMERA(UVC)
- 用途:手先まわりの広い視野をRGBで取得。模倣学習の主たる視覚観測になりやすい。
③ グリッパー制御:CH340 シリアル変換
カメラではありませんが、同じUSB系統に CH340 USBシリアル変換が出てきます。これがグリッパーの開閉制御を担うシリアルで、/dev/ttyUSB* に割り当たります。
3-3. Pika Gripper と G1 の物理的な接続方法
Pika Gripper(690g)をG1の腕先に機械的に取り付けるパートです。
フランジアダプタが必須
G1の手首にはそのままでは付かないため、G1側手首インターフェースに合わせたアダプタプレートを間に噛ませる前提になります。
今回は、このアダプタフランジを 3Dプリンタで自作しました。製作したフランジが以下です。
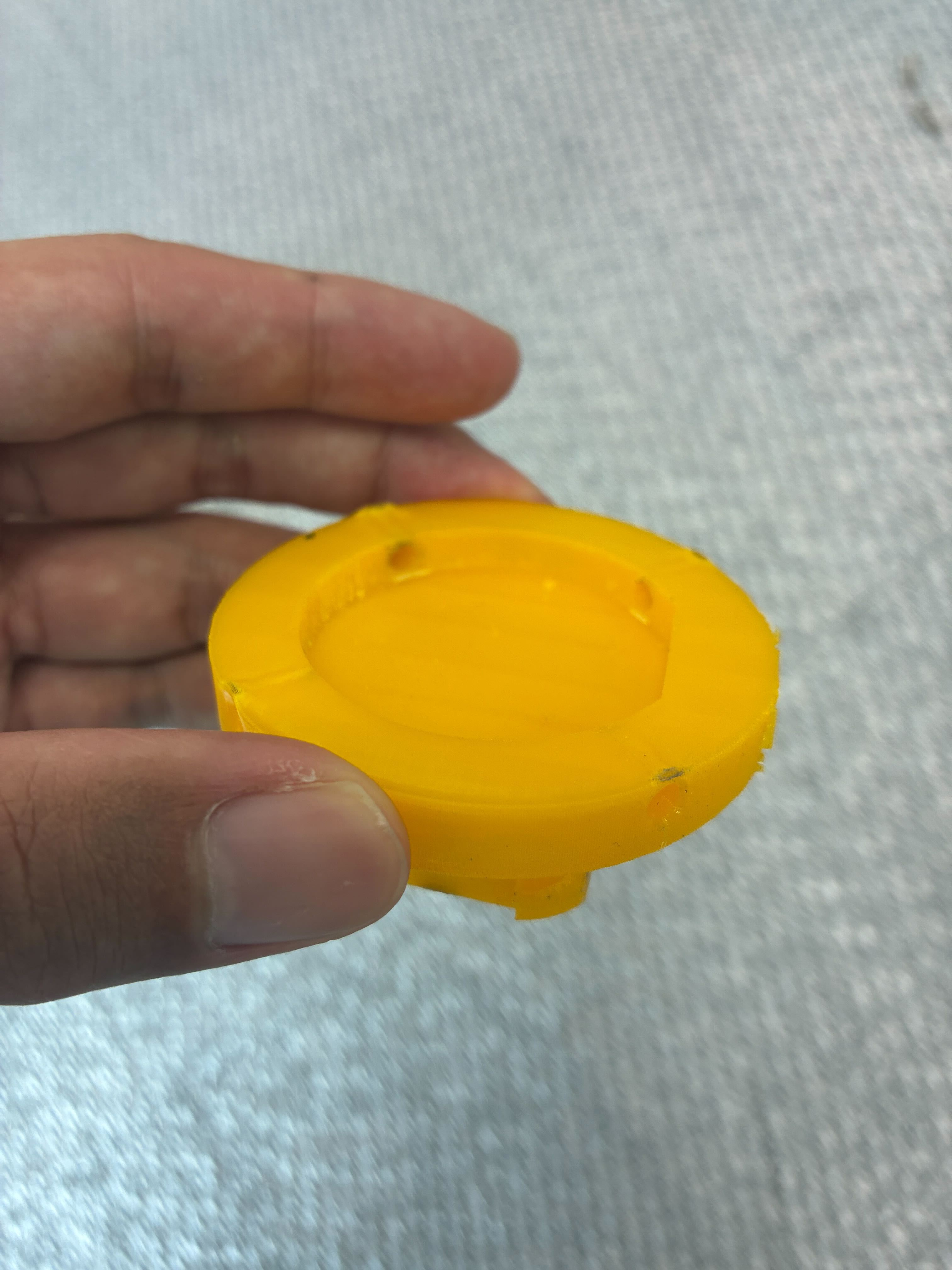

アダプタはできるだけ軽く作る
経験的に、G1 が腕を伸ばしてバランスを崩さずにピッキング作業ができる手先荷重は 1kg 程度まででした。Pika Gripper 本体だけで 690g あるため、手先の重量はすでにこの上限の大半を占めています。
そのため、間に噛ませるアダプタフランジは可能な限り軽く作るのが重要です。残りの数百グラムにアダプタの重量や配線が収まるように、3Dプリンタで作る際も肉抜きや充填率の調整で軽量化しておくと、姿勢の安定や可動範囲に余裕が出ます。
3-4. Pika Gripper の電気的な接続方法
物理マウントができたら、通信と電源を繋ぎます。Pika Gripperは「24V電源」と「Type-C通信」の2系統が要るのが最大の特徴です。
① 電源(24V DC)
Pika Gripper のモータ駆動には 24V が必要です。今回は、この24V を G1 の首元から取得しています。
- 24V は G1 の首元の電源から取る
- 電源と通信は別系統。24Vラインとは別にType-Cの通信ケーブルを通す
② 通信(Type-C → Jetson に直結)
Pika Gripper の通信は USB-C ケーブルで G1 の首元のUSBポートに接続しています。
Unitree G1側とPika Gripper側は最終的に下記のような接続状況になっています。

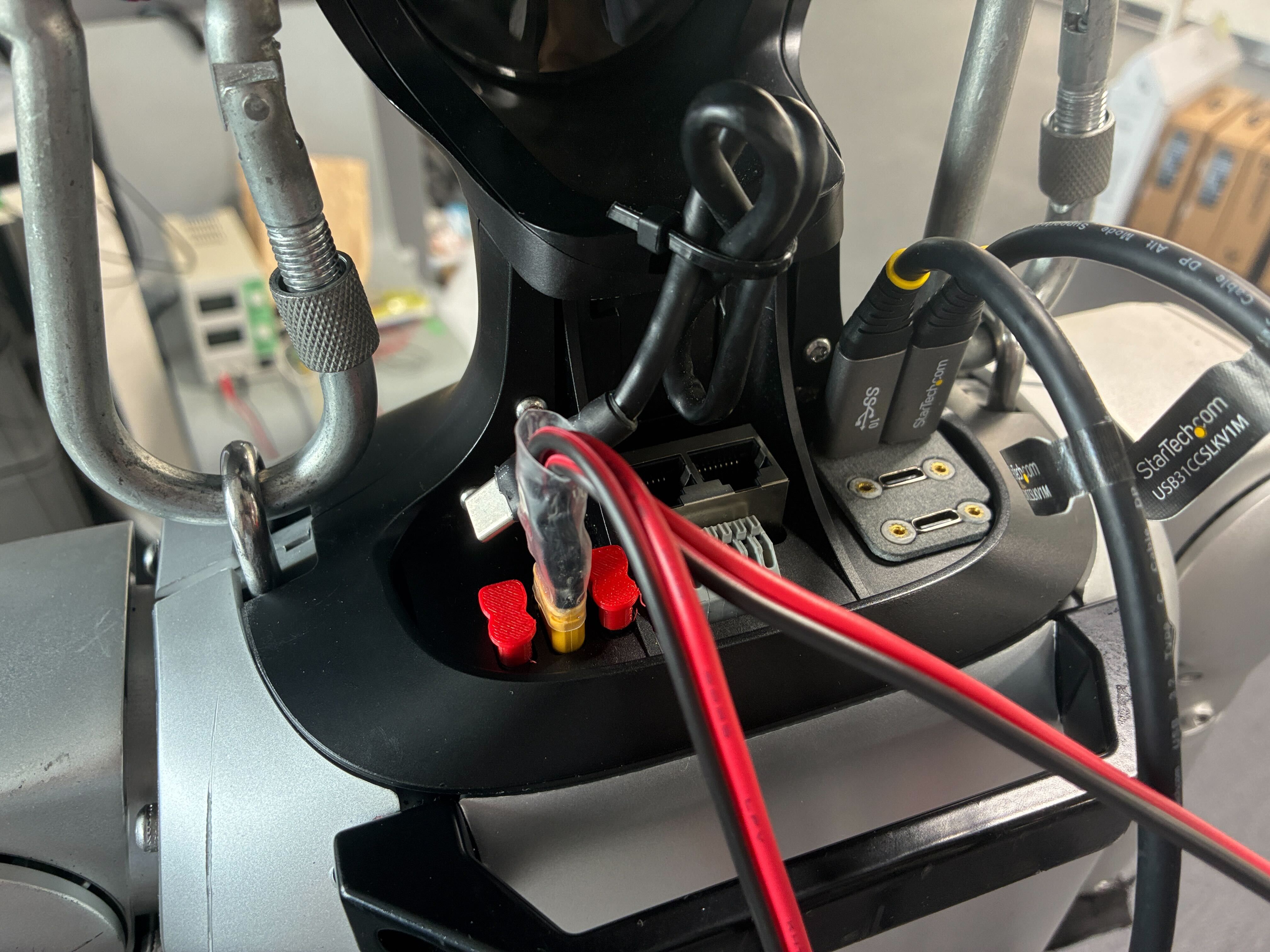
また、G1 が動くと振動でUSBコネクタが緩み、カメラ/シリアルが瞬断することがあります。そのため、ネジやツメで物理的に固定できるロック付きのUSBケーブルを使うことをおすすめします。たとえばサンワサプライの抜け止め防止Type-Cケーブル(KU-20GCCPEDSL10)は、2つのネジでコネクタを固定でき、振動でのケーブル抜けを防げます。
最終的には下記画像のようにPika GripperとUnitree G1を取り付けました

まとめ
本記事ではパイプラインの (0) ハード準備 をまとめました。
- Pikaとは:人がデモを集める Pika Sense、ロボットが実行する Pika Gripper、6自由度の位置姿勢を測る Pika Station の3モジュール構成。今回は両腕で動かすため Pika Sense・Pika Gripper を2台ずつ、Pika Station を2台用意した。
- Pika Station:測位システムの仕様として必ず2台を周辺に設置(Pika Sense 1台でも2台必須)。電源はAC(100Vコンセント)で、2台分のコンセントが必要。
- Pika Sense:USBケーブル1本でPCに接続(外部電源不要)。
- Pika Gripper のカメラ:
lsusbで確認すると、深度カメラは Intel RealSense D405、広角カメラは DECXIN CAMERA(UVC)、グリッパー制御は CH340 シリアルとして見える。 - Pika Gripper の物理接続:標準フランジがG1非対応のため、アダプタフランジを3Dプリンタで自作。手先荷重は経験的に1kgが目安で、Pika Gripper本体が690gあるためアダプタはできるだけ軽く作る。
- Pika Gripper の電気接続:24VはG1の首元から取得。通信はUSB-CでG1首元のUSBポートに接続。振動でのコネクタ緩み対策として、ネジで固定できるロック付きUSBケーブルを使うと安心。
次回以降は、Pika Senseを使ったデータ収集や、収集したデータでのモデル学習、G1へのデプロイ、そしてスポンジピッキングの実行まで、パイプラインの続きを順に書いていく予定です。
最後に
GMO AIRでは、ロボティクスのリサーチエンジニア/リサーチサイエンティストを募集しています。ご興味を持って頂ける方がいらっしゃいましたら、ぜひ募集職種一覧からご応募をお願いします。皆さんのご応募をお待ちしています。
